Manufacturing & Industrial Automation
From a capable cell or model to a repeatable product for real lines and operators
Open the decision dossier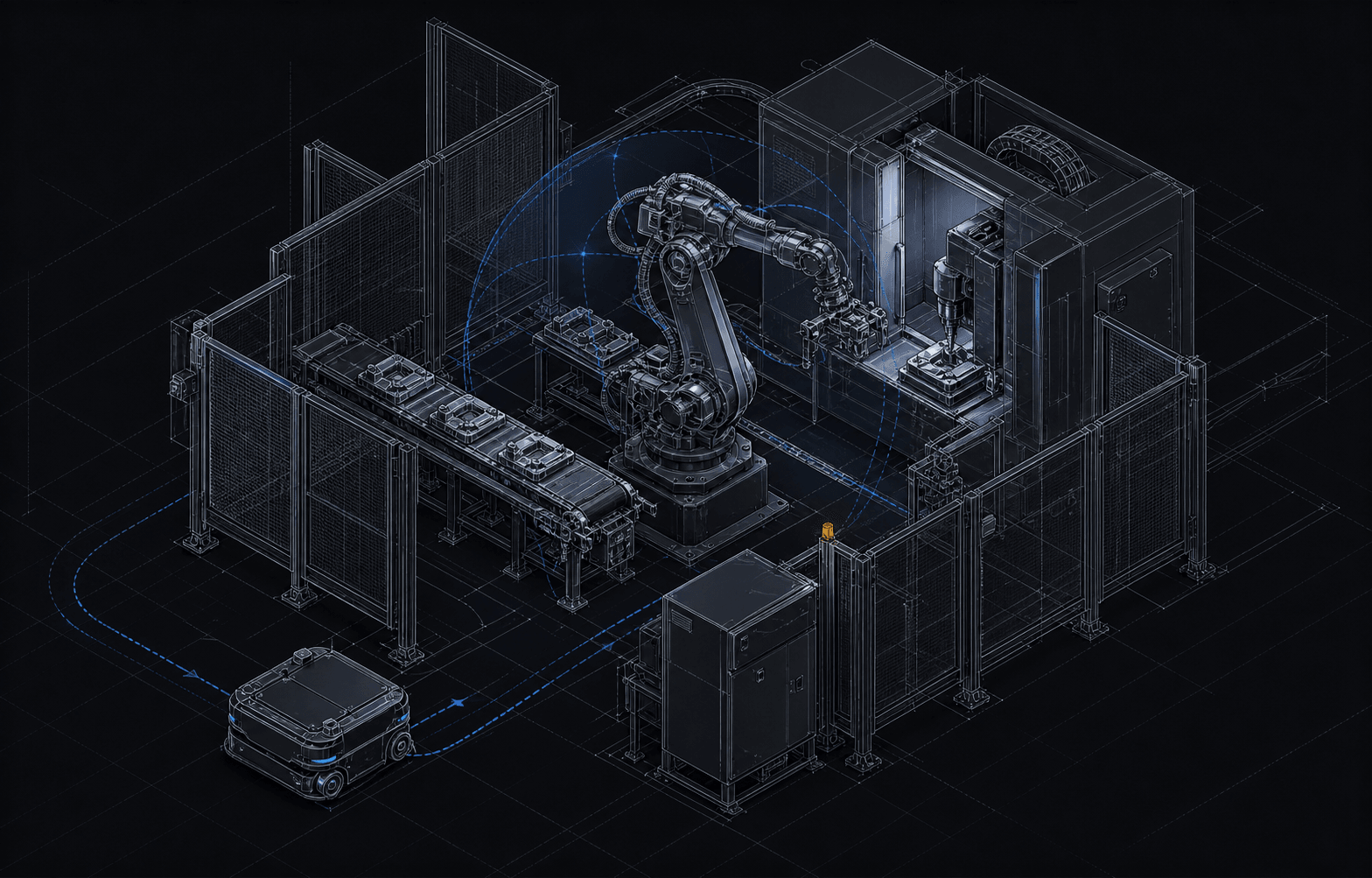
Decision engineering for Physical AIIndustrial & Physical AI product leadership for founders and product leaders building robotics, autonomous systems and AI-enabled industrial products.
Mohammed Cherifi leads product and architecture decisions for robotics, autonomy and industrial-AI teams—across solution, system, software, data and AI, from strategy and discovery through productization, launch and scale.
17+ years across connected products, mobility and industrial systems · French Government AI Ambassador for Industry — Osez l’IA Initiative · Forbes Technology Council Member Leader — Tech Consulting Group
The product ownership gap
Physical AI crosses customer workflows, hardware, software, models and field operations. Without one owner for the trade-offs across them, engineering can keep progressing while the product decision remains unresolved.
No shared acceptance bar. Model or cell performance is measured, but the complete product customers must buy, operate, support and trust is not.
Hidden work props up the pilot. Expert tuning, operator intervention, bespoke integration and unpriced support disappear from the business case.
Decisions arrive too late. Intended use, field boundaries, service, safety and unit economics surface after expensive architecture commitments.
The missing layer is product ownership: one accountable leader connecting customer evidence, system behaviour, field reality, safety and economics before the next commitment.
From proof to operated product
Hyperion Physical AI Product System
Five gates govern when a product may advance. Six lenses test whether the evidence is complete: value, economics, intelligence, architecture, trust and operations.
Cyclical, not a waterfall: evidence, incidents or economics can send a product back to an earlier stage.
Customer and operator value
Business model and product economics
AI, data, evaluation and human-machine interaction
Hardware, software and system architecture
Safety, cybersecurity, governance, compliance and human oversight
Deployment, operations, product family, partners and ecosystem
Applied AI systems
Hyperion connects product intent, system architecture, datasets and evaluation before choosing RAG, fine-tuning, a task-specific small language model — or no model at all.
The objective is not more AI. It is the least complex system that can meet the product's acceptance bar under real operating constraints.
Applied AI product architecture
Bounded intelligence for products where latency, privacy, power, connectivity or offline operation shape what is viable.
Knowledge products that preserve source authority, permissions, provenance and abstention instead of hiding uncertainty behind fluent answers.
Datasets, simulations, evaluation suites and feedback loops treated as governed product assets rather than one-off inputs to a model build.
An accountable architecture across hardware, software, AI, data, controls, safety, security, people, edge and cloud — designed around failure as well as nominal operation.
Industrial & Physical AI Product Leadership
Industry fluency is not a list of standards or use cases. It is the ability to draw the physical system, expose where product ownership fractures, and connect operator reality to evidence and economics.
All industriesFrom a capable cell or model to a repeatable product for real lines and operators
Open the decision dossierOne product boundary across vehicle, platform, market and post-sale operation
Open the decision dossier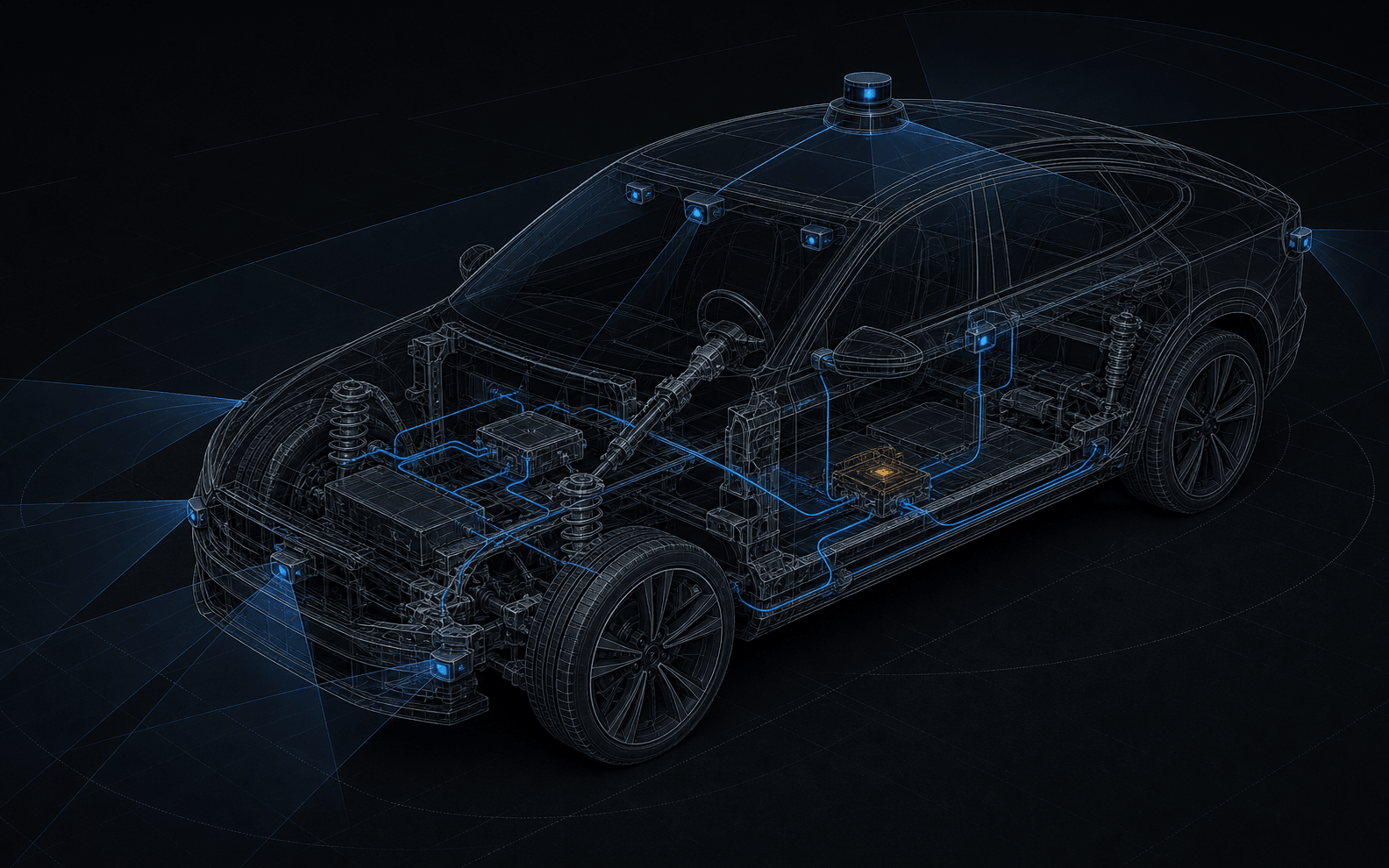
Whole-fleet reliability, field operations and economics—not model performance alone
Open the decision dossier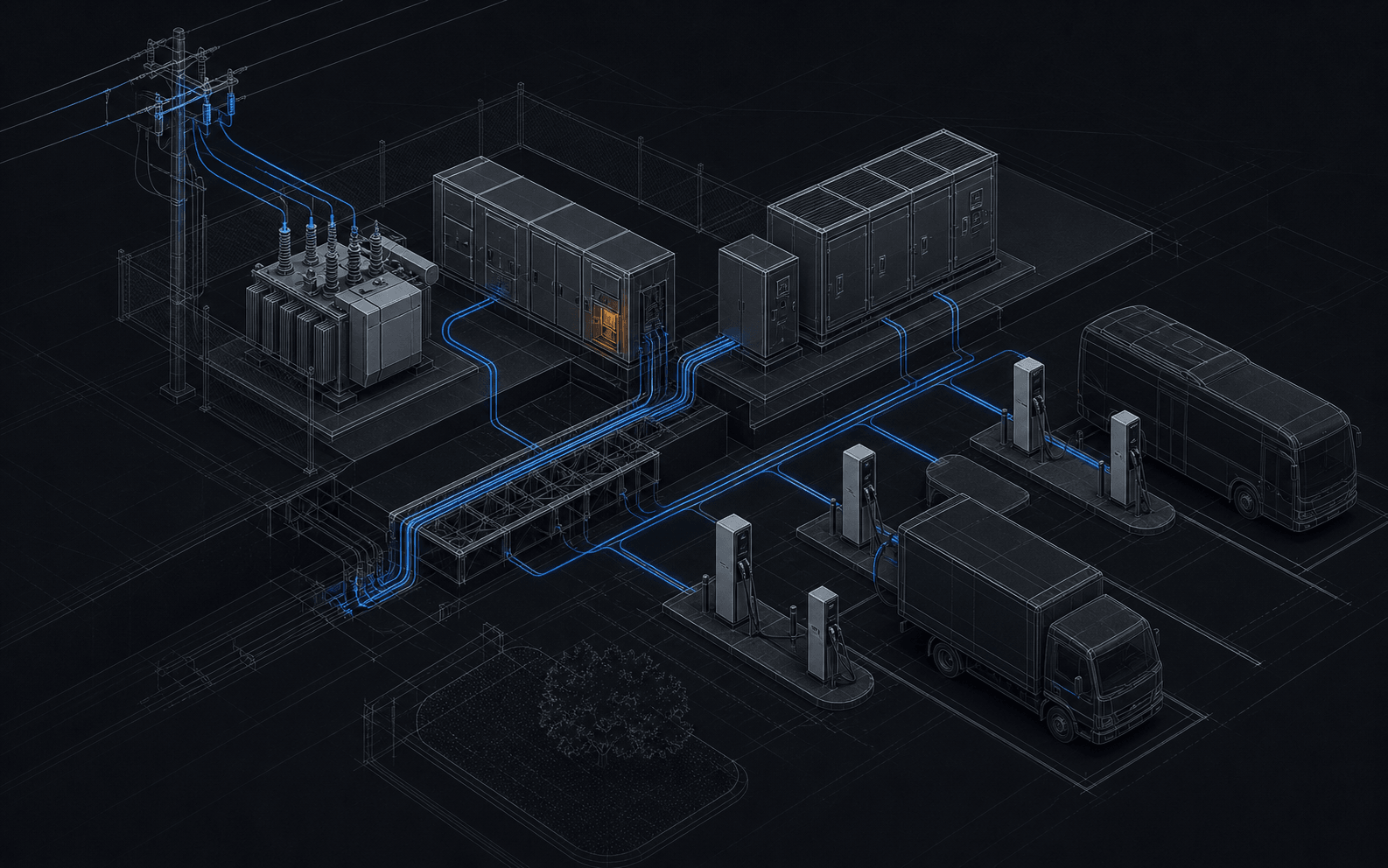
Adjacent sector
Logistics, agrifood, maritime, smart infrastructure and defence remain visible as noindex sector dossiers. They show how the product-system method might apply without presenting researched relevance as client, career, clearance or assurance evidence.
An adjacent sector for mixed fleets, facilities, interventions and per-move economics
Read the sector dossierAn adjacent sector for biological variability, serviceability and seasonal economics
Read the sector dossierAn adjacent sector for disconnected autonomy, remote authority and mission economics
Read the sector dossierAn adjacent system-of-systems sector for mobility, energy, buildings, public-space operations and resilient urban services
Read the sector dossierAn unclassified adjacent sector for mission-ready, accountable and supportable Physical AI
Read the sector dossierRobotics and autonomy cross every primary market.
Explore intelligent machinesHow to engage
Choose an embedded fractional mandate, one bounded decision or one named product milestone. Each stands alone.
You need senior product leadership now, but not yet a permanent executive.
Fractional CPO for Physical AI
Embedded product and portfolio leadership across strategy, discovery, productization, launch and scale.
Duration
Recurring part-time mandate; authority, cadence and capacity agreed in writing.
You need to decide what happens next.
Make one consequential product decision with evidence.
Duration
Two to three weeks.
You need a senior owner for the next product milestone.
Lead one product to a named evidence gate.
Duration
Milestone-based, with scope and acceptance criteria agreed in writing.
Every engagement has a written decision, evidence gate, authority boundary, stop condition and handover owner. None requires a follow-on engagement.
Runnable · inspectable · publicly checkable
Run the demonstration. Inspect the reference implementation. Read the paper. Each item states what it proves, its maturity and its limitations.
Measured · simulated · internal R&D
Inspect the measured feasibility work behind the bench — physical sensing, teleoperation, evaluation and learned behaviour. Every figure is labelled measured, simulation or dry-run.
Pre-production · owned reference implementation · internal R&D
Auralink is Hyperion's owned pre-production reference implementation. Inspect the architecture, control boundaries, operational decisions and evaluation approach behind the method.
Public paper · publicly checkable
Read Mohammed Cherifi's public paper and inspect its argument, architecture and cited basis directly.
These are Hyperion-owned research and engineering artefacts. They are not customer deployments or commercial outcome evidence.

You work directly with Mohammed — a product leader across connected platforms, mobility, industrial systems and AI, now focused on Physical AI products.
Cisco → RNM Alliance → ABB → Hyperion
Founder career — not Hyperion clients
These marks represent founder career, advisory work, memberships and affiliations. They do not represent Hyperion clients.
Advisory work, not Hyperion clients
Appointments and bodies Mohammed belongs to — not client relationships.

Fit
Hyperion owns the product leadership mandate and only the hands-on work explicitly named in scope. Your team retains enduring ownership of the product and broader delivery. Legal advice, conformity assessment, penetration testing and full functional-safety work remain with qualified specialists.
Hire when the mandate is stable, the role is permanent and you can wait for the right person. Use Hyperion when the immediate decision cannot wait, the permanent role is not yet clear, or you need evidence before adding long-term capacity. The engagement can also define the decision rights and hiring brief your team will retain.
In a 30-minute fit call, we will identify the decision, the missing evidence and whether Hyperion is the right mandate — or say plainly that it is not.
Mohammed leads every engagement personally. Scope and capacity are confirmed before work is accepted.
30 minutes · no obligation
Selected Insights